fat12文件系统仿真实验报告 实验目的 本实验目的在于学习fat12文件系统,增强编写C语言、C++语言和汇编语言程序的的能力,为进一步学习操作系统相关知识做好准备。
实验要求 总体要求 用c、c++或汇编与c组合,编写一个具有下列功能的可视化或命令操作的FAT12文件系统仿真程序
具体要求 用c、c++或汇编与c组合,编写一个具有下列功能的可视化或命令操作的程序:
1.查看fdd144虚拟软盘的第一个扇区内容是否符合FAT12格式。
实验方案与过程 实验环境 首先通过WinImage软件创建一个虚拟软盘,往里面添加文件,保存后得到一个fat12格式的软盘。为了方便验证结果是否正确,我使用了HexView工具来查看软盘的内容。编写代码时,我主要在WSL(一个可以在windows操作系统下运行的linux简化版)系统下使用VSCode编辑器,用c语言和c++语言进行编程。
fat12文件系统相关知识 一块1.44MB的fat12格式的软盘共有2880个扇区,每个扇区512占个字节。其中第0个扇区称为主引导扇区;第1-9扇区为fat表;第10-18扇区是fat表的复制版;第19-32扇区为根目录区;从第33扇区往后为数据区。
字节和扇区在fat12文件系统中是两个相当重要的概念,为此,我们在程序中定义bt这个结构体来表示字节,sector这个结构体来表示扇区。为了方便行文,先给出它们的定义:
1 2 3 4 5 6 7 8 typedef struct byte //用byte 和bt 来表示字节{ char s[9 ]; char h, l; uc ascii; void input () void from_char (char c) } bt;
1 2 3 4 5 6 7 8 typedef struct Sector { bt bs[SIZE_OF_SECTOR]; void input () void input_from_string (string a) void output () bt operator [](int i); } sector;
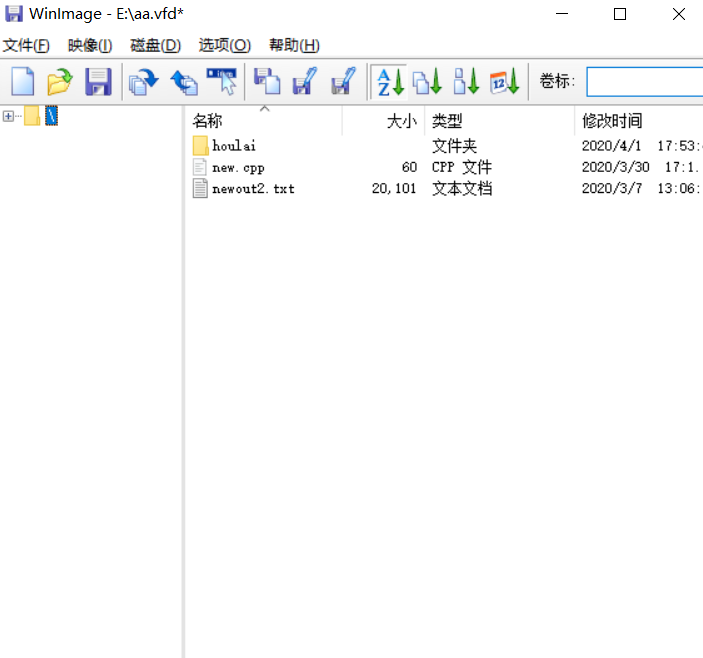
创建软盘 我们使用WinImage工具创建软盘。
引导扇区 引导扇区主要记录了软盘的相关信息和引导扇区程序。启动计算机时,BIOS程序通过读入引导扇区中的引导扇区程序来启动操作系统。引导扇区的内容如下表所示:https://blog.csdn.net/begginghard/article/details/7284834?depth_1-utm_source=distribute.pc_relevant_right.none-task&utm_source=distribute.pc_relevant_right.none-task )
BIOS程序通过识别结束标志判断该软盘是否符合fat12格式。
在程序中,我们需要将软盘中的第一个扇区读入程序中,并判断它是否符合fat12格式。由于引导扇区本身就是一个扇区,所以定义sector的子类MBR,用以表示一个扇区。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 struct MBR :public sector{ char BS_OEMName[8 ]; short BPB_BytsPerSec; char BPB_SecPerClus; short BPB_RsvdSecCnt; char BPB_NumFATs; short BPB_RootEntCnt; short BPB_TotSec16; char BPB_Media; short BPB_FATSz16; short BPB_SecPerTrk; short BPB_NumHeads; int BPB_HiddSec; int BPB_TotSec32; char BS_DrvNum; char BS_Reserved1; char BS_BootSig; int BS_VolID; char BS_VolLab[11 ]; char BS_FileSysType[8 ]; void init () bool check () void print (int & Byte_Per_Sector,int & Sector_Per_Cluster,int & Num_Of_Fats,int & Root_Entry_Count,int & Num_Of_Sector,int & Size_Of_Fat,int & Sector_Hidden) };
在程序开始时,我们首先读入MBR,调用init()函数对各个变量进行赋值;再检查它的前三个字节是否为0xeb 0x58 0x90;然后检查各个变量是否符合默认值;最后看结束标志是否为 0xaa55。如果发现问题,则给出提示信息并中止程序。如果检查正确,则调用print()函数输出各项信息。
fat区 fat区共有18个扇区,其中后9个扇区是前9个扇区的副本。fat12文件系统启动时,需要检查这两部分是否一样。我们将前9个扇区称为fat表。从名字中就可以看出,fat表是fat12文件系统的核心。
在fat12文件系统中,文件存储是以簇为单位的,一般情况下,一个簇就是一个扇区,所以下文将簇与扇区划等号。对于一个文件,如果它的大小小于512字节,则在数据区中给它分配一个簇,将它的内容写进这个簇里,然后将fat表中这个簇对应的值(下文会详述这种对应的方式)修改为一个特殊的结束标志。
如果它的大小大于等于512字节呢?首先还是分配簇a,将文件的前512个字节写进簇a里,然后再分配一个簇b,将fat表中簇a对应的值修改为一个值,通过这个值我们能找到b扇区,然后再分配一个簇c,将fat表中簇b对应的值修改为一个值,通过这个值我们能找到簇c……一直这样下去,直至文件结束,将分配的最后一个簇在fat表中对应的值修改为结束标志。
这样,读文件时,只需知道这个文件开始的簇,就可以读下一个簇,下下个簇……直到在fat表里读到结束标志为止。
下图是一个fat表的开头:(这个fat表不是刚才创建的软盘的fat表)
既然如此,fat表该怎么读呢?如果你以为是顺着读,就太naive了。我们知道x86系统采用小端存储方式,就是说,低字节存储在高地址位中(高地址位就是地址值较小)。比如说,一个16位整数0000000011111111,在x86系统中会先存11111111(低字节),再存00000000(高字节)。https://i.loli.net/2020/03/30/7RItOHvzNwFl6D5.png )
现在我们知道如何读这个fat表了。但问题来了,读出来的值有什么用呢?fat表中读出的第一个值表示坏簇标志,一般为0xff0,第二个值是结束标志,一般为0xfff。后续的每个值代表这个簇的下个簇的簇号。如第三个值为0x004,代表第一个簇(前两个值不算)对应的下一个簇是第二个簇,第四个值为0xfff,表示这个文件到第二个簇这里就结束了。
在程序中,我们定义一个fat结构体:
1 2 3 4 5 6 7 8 9 10 11 typedef struct Fat { vector <bt> bts; bt operator [](int i) { return bts[i]; } vector <int > cluster_numbers; void init (MBR mbr) int get_first_empty () void write_floopy () int get_empty () } fat;
程序开始时还是先把fat表读进来,并检查两个fat表是否一致,不一致就报错。然后统计空闲簇和坏簇的数量。
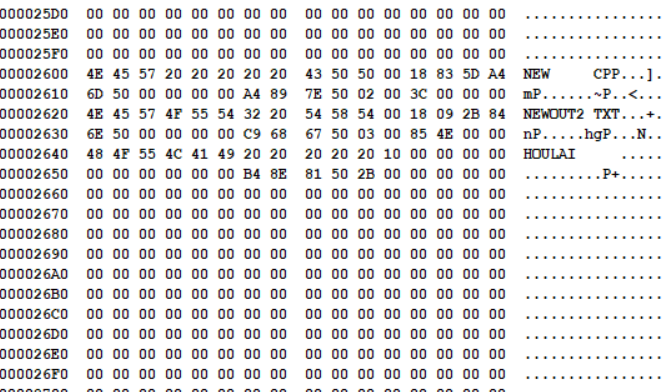
根目录区与数据区 根目录区占14个扇区,由于前面已经用了19个扇区(引导扇区1个,fat18个),所以根目录区是从第19个扇区开始的,起始位置是0x2600。根目录里每32字节构成了一个文件记录,记录了这个文件的基本信息,我们可以根据这个记录来找到文件的内容。
在程序中,我们定义rootentry类来表示根目录区,它比较简单,只有一个bt类型的数组,也不需要检查什么东西。
1 2 3 4 5 typedef struct RootEntry { vector <bt> bts; } rootentry;
从第33个扇区往后的扇区都是数据区,每个扇区512字节。定义datas类表示数据区。数据区一般包含2847个扇区,所以定义一个sector数组。
1 2 3 4 5 6 typedef struct Datas { vector <sector> secs; void write_floopy (int clus_num, string content) } datas;
文件与文件夹 文件的读写是fat12文件系统的重点。我们先来了解文件是怎么组织的。
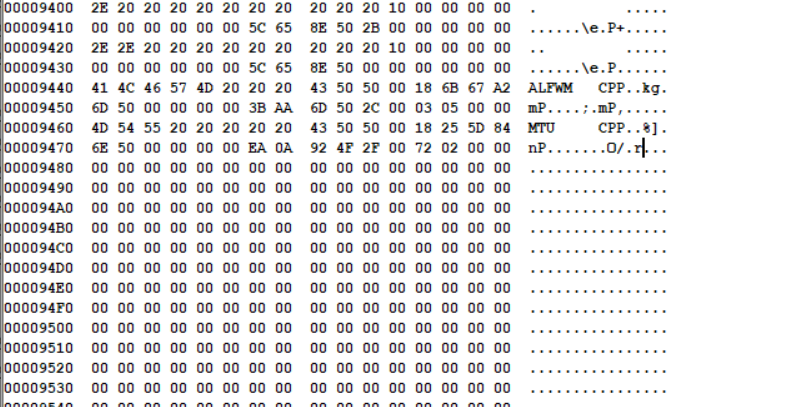
一个文件会有一个32个字节的文件记录,这个文件记录存储在这个文件所属的文件夹里,包含了这个文件的各种信息:
第1-8个字节是文件名,如果长度不够就用空格填充;
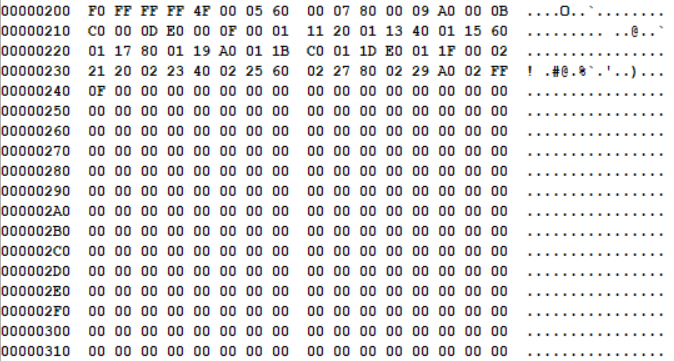
对于第一个文件,它的名字是NEW,后缀名是CPP,文件属性是0x00,说明它是一个普通文件。创建时间是0x89A4,换成二进制是
1000 1001 1010 0100。
其中前5位是小时,10001=17,说明创建时间是17点;后6位是分钟,001101=13,说明具体时间是17:13。后五位没有作用(因为5位最多表示32个数,而一分钟有60秒)
创建日期是0x507E,换成二进制是
0101 0000 0111 1110
前7位是年份与1980的差值, 01010000=40,40+1980=2020,说明文件创建于2020年;后面4位是月份,0011是3,说明是2020年的3月;后面5位11110=30说明日期是 2020-3-30
大小是0x0000003c,说明它一共占60个字节。
现在我们知道了这个文件的基本信息,我们要怎么找到它的内容呢?这就需要我们看一下数据区了。
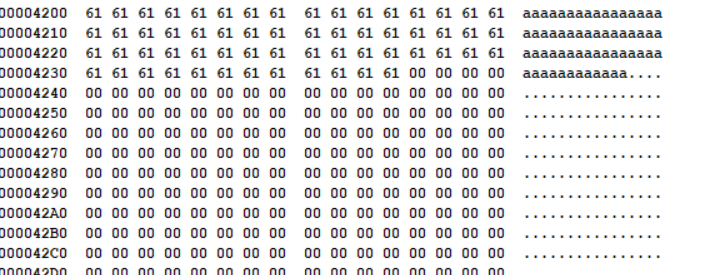
从第33个扇区往后的扇区都是数据区,每个扇区512字节。上文的NEW.CPP文件的起始簇号是2,由于fat表前两个值有其他用途,所以簇号2代表的是第一个簇,或者说数据区的第一个扇区。
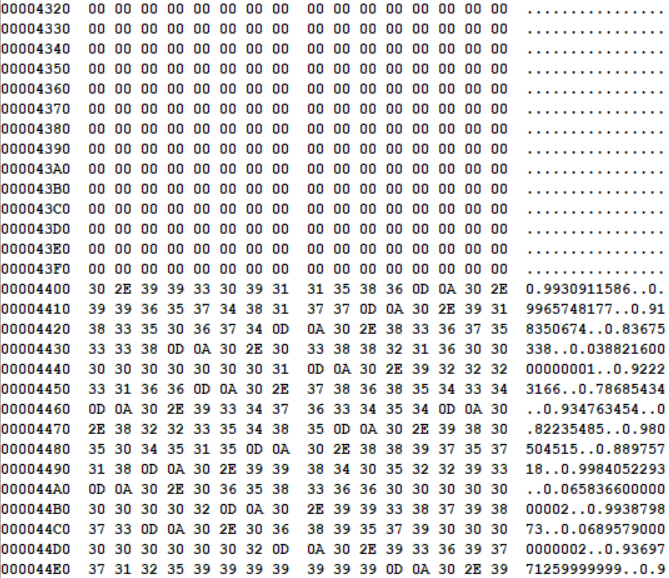
数据区的起始位置是0x4200,我们看看这里有什么:
再来看根目录下的下一个文件,起始簇号是3,代表它开始于数据区的第一个扇区,即0x4400
它是一些奇奇怪怪的东西。
根据前文所述的读文件方法,我们可以把整个文件读出来,在此不再赘述。
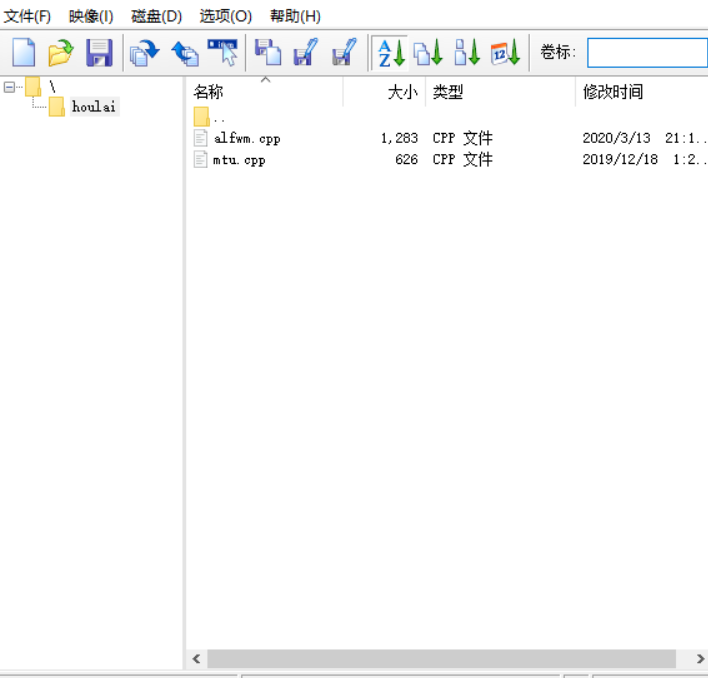
打开前面创建的软盘,点击上方的映像、创建文件夹,然后输入名字,就可以创建一个文件夹了。
可以看到,这里也是一个个文件记录,其中有两个比较奇怪,第一个文件记录的名字是”.”,第二个文件记录的名字是”..”。事实上,除了根目录之外的每个文件夹都有这两个记录,”.”表示的是当前文件夹,”..”表示的是上一级文件夹。在程序中读取文件时它们会被忽略。
了解了文件和文件夹的存储原理,在程序中读入文件的方法也就很简单了。
在程序中,我们把文件和文件夹统一看成文件,用file类来表示它:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 typedef struct File { string content, path; string name, suffix; int attr, fstclus, size; unsigned short Time, Date; File *fa; map <string , File *> sons; File() {} File(string Name, File *now); File(string Name, string Content, File *now); File(File *from); unsigned short get_Time (int h, int m) unsigned short get_Date (int y, int m, int d) string ToString () string to_file_record () string to_dir_record () void add_file (File *tem_file) void add_file_root (File *tem_file) void get_content () void write_back (int loc) File *get_son (string Name, bool isn_folder) ; void dir () vector <string > dir_recusive () void remove () void get_content_deleted (int loc) void find_string (int loc, vector <string > &b, vector <string > &ret) void create (File *tem) } file;
具体实现 本系统完成了要求的所有功能,此外还增加了find功能,具体情况请看下表:
指令
功能
备注
help
输出提示信息
无
quit
退出系统
无
cd [相对路径或绝对路径]
进入指定的文件夹
“..”表示上一级文件夹,”.”表示当前文件夹,用’/‘作分隔符
dir
展示当前文件夹下的文件信息
会输出名字、后缀、修改时间和大小
dir_r
递归的展示当前文件夹下的所有文件
只能看到名字和后缀
print [相对路径或绝对路径]
输出文件内容
目标文件不能是文件夹
gedit [相对路径或绝对路径]
进入文本编辑器模式,编辑指定的文件
无
mk [文件名] [文件内容]
在当前路径下创建一个文件
文件名长度不能超过8,文件名不能包含非法字符,文件要有后缀,不能与已有文件同名
mkdir [文件夹名]
在当前路径下创建一个文件夹
文件夹名长度不能超过8,文件夹名不能包含非法字符,不能与已有文件夹重名
rm [相对路径或绝对路径]
删除一个文件或文件夹
删除操作不可逆,请谨慎操作
find [相对路径或绝对路径]
根据路径查找文件(夹)
支持通配符’‘和’?’。’ ‘可以表示任意长度的字符串,’?’可以表示任意字符。系统会输出所有可能的路径
cp [相对路径或绝对路径][文件夹的相对路径或绝对路径]
复制文件(夹)
将第一个参数复制到第二个参数指向的文件夹处
mv [相对路径或绝对路径][文件夹的相对路径或绝对路径]
剪切文件
将第一个参数剪切到第二个参数指向的文件夹处
由于许多操作都需要按路径名找到文件,所有我们先来了解按路径名寻找文件的方法:
路径分析 我们在file类中定义了一个map<string,file*>类型的成员变量sons,不用我说也能知道它的作用是什么。
在创建一个文件时,如果它是一个文件夹,则对应它的所有子文件,往sons里加入一个(pair){文件名+”.”+后缀,指向该文件的指针}。这样,我们就能很轻松地根据文件名和后缀找到对应的文件。
我们定义path_analysis和path_analysis2函数。path_analysis2函数接受一个字符串,将它用’/‘分隔为一个字符串向量并返回。
用户输入路径可以是绝对路径或相对路径,当第一个字符为’/‘时,我们认为这是绝对路径,从根目录开始找;否则认为这是相对路径,从当前文件夹下开始找。
从根目录开始找的方法是:
设输入字符串向量为vec,根文件夹指针为f1。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 file *path_analysis (string input, file *now, file *root) if (input == "" ) return NULL ; bool rt = (input[0 ] == '/' ); for (auto i : input) { if (!isalpha (i) && !isdigit (i) && i != '/' && i != '.' ) { return NULL ; } } vector <string > folder_names = path_analysis2(input); file *tem; if (rt) tem = root; else tem = now; for (int i = 0 ; i < folder_names.size(); i++) { tem = tem->get_son(folder_names[i], i + 1 == folder_names.size()); if (tem == NULL ) { return NULL ; } } return tem; }
从当前目录开始找的方法与此基本相同,不再赘述。
cd操作的实现 既然了解了路径分析的方法,cd操作的实现也就呼之欲出了。我们在程序中定义两个指针,一个名为tem,指向当前所在的文件;一个名为root,指向根文件夹。只需要根据这两个指针和输入的字符串调用paht_analysis函数即可,如果函数返回NULL则报错,否则修改tem。
代码如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 else if (a == "cd" ){ cin >> b; file *now = path_analysis(b, tem, root); if (now == NULL || now->attr != 0x10 ) { cout << "路径" << b << "不合法\n" ; } else { tem = now; } }
dir操作的实现 进行dir操作时,我们遍历sons,输出所有子文件(夹)的信息,包括文件名、后缀、修改时间和大小。由于这个操作十分简单,代码就不必展示了。
dir_r操作的实现 这个操作的实现需要用到递归的思想。
定义dir_recusive()函数,它返回一个字符串向量。它的实现方法是: ret用于返回。
dir_recusive()函数代码如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 vector <string > File::dir_recusive () vector <string > vec, tem; vec.push_back(name + (attr == 0x10 ? "" : "." + suffix) + "\n" ); for (auto i : sons) { if (i.first == "." || i.first == ".." ) continue ; tem = i.second->dir_recusive(); for (int j = 0 ; j < tem.size(); j++) { vec.push_back(" " + tem[j]); } } return vec; }
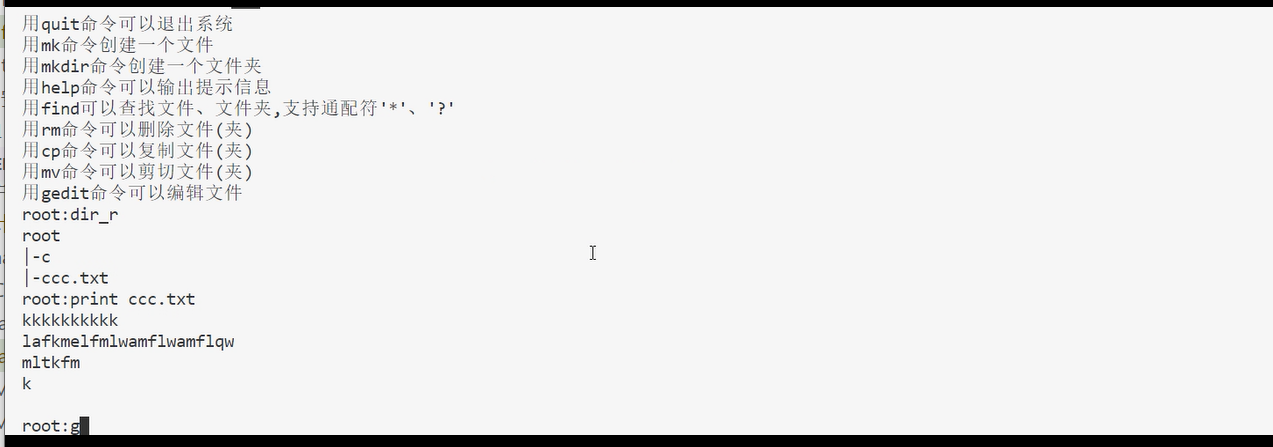
print操作的实现 这个操作很简单,根据输入的路径找到相应的文件夹,然后输出它的内容即可。
mk操作的实现 这个操作是重点和难点。首先我们要根据第一个参数找到文件夹,根据第二个参数创建一个文件。怎么创建一个文件?
我们知道文件是保存在数据区里的,那我们要在数据区里找到一个空闲的扇区,这可以在fat表里找(也可以用已删除的文件占用的扇区,这会在下文讲解)一个空闲簇号,找到之后将内容写到对应的扇区,将fat表对应的位置修改为一个结束标志。如果文件内容不止512个字节,则继续分配一个簇号,将内容写进去,将fat表中上一个簇号对应的位置修改为一个这个簇号,将这个簇号对应的文职修改为一个结束标志。一直这样下去,直到写完为止。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 while (!Content.empty()){ if (Content.size() > 512 ) { datas1.write_floopy(nowclus - 2 , Content.substr(0 , 512 )); Content = Content.substr(512 ); fat1.cluster_numbers[nowclus - 2 ] = fat1.get_first_empty() + 2 ; nowclus = fat1.cluster_numbers[nowclus - 2 ]; fat1.cluster_numbers[nowclus - 2 ] = END_CLUSTER; } else { datas1.write_floopy(nowclus - 2 , Content); Content = "" ; fat1.cluster_numbers[nowclus - 2 ] = END_CLUSTER; } }
创建文件的其他操作就很简单了,注意要设置fa指针指向父文件夹。此外还要给文件生成一条文件记录,把它添加进父文件夹的内容里,给父文件夹的sons变量添加一个键值对。最后把fat表更新一遍。
mkdir操作的实现 搞定了mk操作后,mkdir也就差不多了。区别是创建出来的文件的内容是两条文件记录,记录”.”和”..”这两个”子”文件夹。
rm操作的实现 rm操作可能是最难的操作了。, int>>类型的全局变量deleted_clusters。它的每一个元素是一个 file ,int 对。
当我们删除某个文件夹下的一个文件时,我们将它的文件记录的第一个字符变成一个删除标志,同时需要将 指向文件夹的指针 和 这个文件记录的序号 组成一个pair,push进deleted_clusters里。
这样做有什么好处呢?假设我们在删除操作完成后就退出系统,然后重新打开,读入文件夹时,我们如果读到一个首字符为删除标志的文件记录,就把指向文件夹的指针和文件记录的序号放进deleted_clusters里。
此后,如果我们需要再创建一个文件,就可以去deleted_clusters找被删除的簇。怎么找呢?我们先通过deleted_culsters的front()方法得到一个pair,根据它找到之前删除文件的文件记录,它不是记录了这个文件在数据区的位置了吗?直接将这些位置覆盖就可以了。覆盖完之后将这个pair pop掉就可以了。
这样就大功告成了吗?还没有,至少还有两个问题:
1.如果被删除的文件占用两个扇区,而我这次创建的文件只有一个扇区,那我把删除文件的首扇区覆盖了,第二个扇区不就成了孤魂野鬼了?
2.将被删除文件的内容覆盖了之后,我们并没有修改它的文件记录,这样,我们下一次启动系统,还是会将它对应的pair读到deleted_clusters里,这样就可能又把它覆盖了一遍,不是就乱套了吗?
其实解决方法也很简单。
第一个问题,只需将首扇区覆盖之后,看一下这个扇区在fat表中对应的值是否是结束标志,如果不是,就修改文件记录,使它的首扇区变成原来的第二个扇区。同时,由于这个文件还没有被完全覆盖,因此不必在deleted_clusters里把它对应的pair pop掉。
第二个问题,只需要将文件记录里的首扇区标志改为0,此后读文件时遇到这种首扇区标志位0的文件记录就跳过即可。
以上就是删除普通文件的基本方法。删除文件夹呢?也很简单,递归地把子文件都删除,再将文件夹也删除了就可以了。
为什么要这样?因为我的deleted_clusters是一个队列,由于子文件先删除,队列又是先进先出的,覆盖的时候便会先覆盖子文件,再覆盖文件夹。否则要是先把文件夹覆盖了,子文件的文件记录找不到了,就出现”孤魂野鬼”了。如果deleted_clusters是一个栈,就应该先删除文件夹,再删除文件。
删除操作的代码如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 void File::remove () if (attr == 0x10 ) { for (auto i : sons) { if (i.first == "." || i.first == ".." ) continue ; i.second->remove(); } } for (int j = 0 ; j < fa->content.size(); j += 32 ) { if ((fa->content[j + 27 ] << 8 ) + fa->content[j + 26 ] == fstclus) { fa->content[j] = DELETED_CLUSTER_SIGN; fa->sons.erase(attr == 16 ? name : name + "." + suffix); fa->write_back(j / SIZE_OF_SECTOR); deleted_clusters.push({fa, j / 32 }); break ; } } }
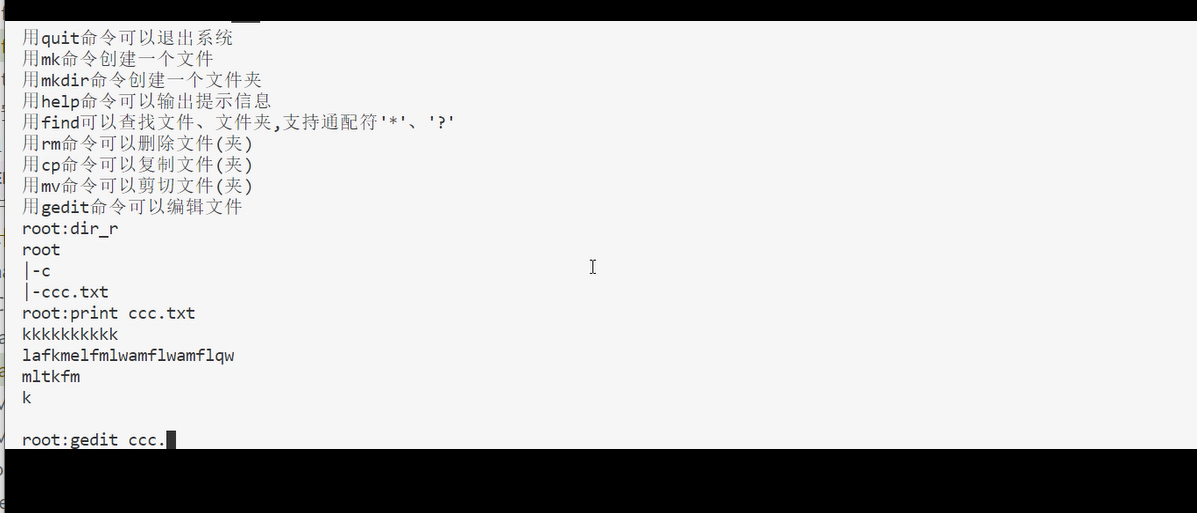
gedit操作的实现 为了实现这个操作,我设计了一个简易的编辑器。它的原理是不断相应键盘的输入,每输入一次就把控制台刷新一次,然后输出。由于这个编辑器与fat12文件系统关系不大,我就不再赘述。
这个操作也是根据输入的字符串找到相应的文件(注意这个文件不能是文件夹),然后调用编辑器编辑它的内容,当用户按下ctrl+s则将修改后的内容保存回去。怎么保存呢?很简单,只需把原来的文件删掉,再创建一个同名而不同内容的文件即可。
find操作的实现 find操作本事不算复杂,但为了使我的文件系统更有特色,我给它增加了’*’和’?’这两个通配符。
’‘表示任意字符串(甚至可以是空的)。比如 “houlai”和”h\ lai”是匹配的。
怎么实现字符串的带通配符匹配呢?一种方法是暴力法,即直接枚举通配符的每一种可能。但这样效率很低,在字符串很长的情况下根本配不出来。
另一种是动态规划法,即dp(dynamic planning),对输出长度为n和m的字符串,它的时间复杂度是O(nm)的,效率很高。由于这部分内容与fat12文件系统关系不大,具体的dp方法就不必赘述,直接给出匹配的代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 bool isMatch (string a, string b) int n = a.size(), m = b.size(); bool ok[n + 1 ][m + 1 ]; for (int i = 0 ; i <= n; i++) for (int j = 0 ; j <= m; j++) ok[i][j] = false ; bool okk[m + 1 ]; for (int j = 0 ; j <= m; j++) okk[j] = false ; okk[0 ] = 1 ; ok[0 ][0 ] = 1 ; for (int j = 1 ; j <= m; j++) { ok[0 ][j] == (ok[0 ][j - 1 ] && (b[j - 1 ] == '*' )); } for (int i = 1 ; i <= n; i++) { for (int j = 1 ; j <= m; j++) { if (b[j - 1 ] == '?' ) { ok[i][j] = ok[i - 1 ][j - 1 ]; } else if (b[j - 1 ] == '*' ) { ok[i][j] = okk[j - 1 ]; } else { ok[i][j] = (ok[i - 1 ][j - 1 ] && (a[i - 1 ] == b[j - 1 ])); } okk[j] = okk[j] || ok[i][j]; } } return ok[n][m]; }
搞定了单个字符串的匹配方法,find操作的实现也就简单了,只需像之间路径分析一样搜索下去,找到了就将路径放进一个vector<string>里。不同的是这里的find可以找到多个路径,因此需要用dfs的方法;而之前的路径分析最多只有一个结果,因此直接找就可以了。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 void File::find_string (int loc, vector <string > &b, vector <string > &ret) if (loc == b.size()) { ret.push_back(path); return ; } for (auto i : sons) { if (isMatch(i.first, b[loc])) { i.second->find_string(loc + 1 , b, ret); } } }
cp操作和mv操作 在明确了如何找文件,如何删除文件之后,这两个操作也就非常简单了,没有进行解释的必要。
代码架构 总共有12个文件,分别是:
文件名
内容
fun.cpp
定义了各种通用的函数
byte.h
定义了byte类
byte.cpp
byte类的实现和与之相关的函数
sector.h
定义了sector类和它的实现
mbr.h
定义了MBR类
mbr.cpp
MBR类的实现
file.h
定义了file类、fat类、rootentry类和datas类。
file.cpp
上述几个类的实现和相应的函数。
getch.cpp
定义了一个函数
my_editor.h
定义了my_editor类和一些函数
interface.cpp
给出了my_editor类的大部分实现,定义了一些与用户交互的函数
main.cpp
包括了程序开始时的检查和根文件夹的读入
总计约1900行代码
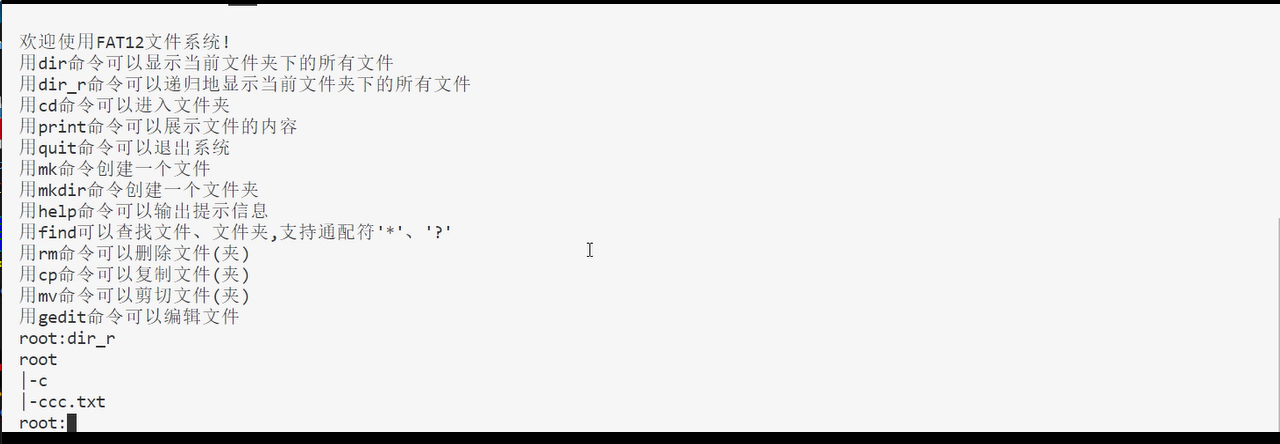
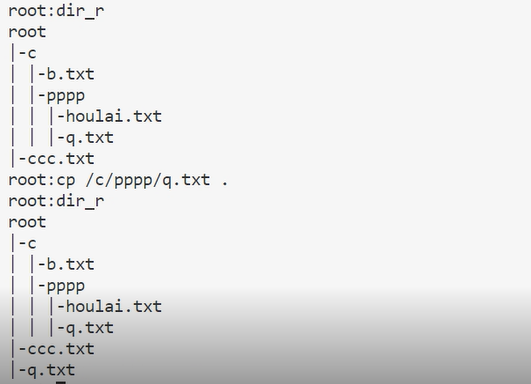
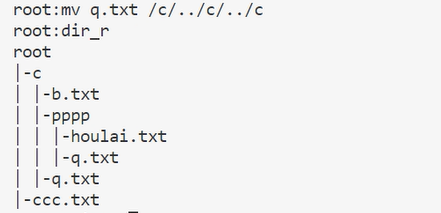
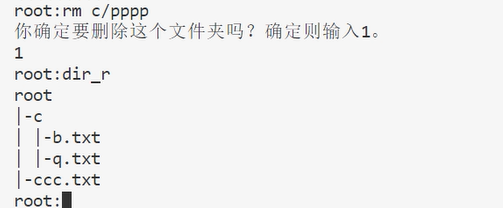
结果展示 使用dir_r可以展示目录树:
详情请看演示视频。
实验总结 这次实验可以说是我做过最难的实验了,代码量大,编程难度高,还用到了搜索、动态规划等算法。但从最后的完成情况来看,我还是比较满意的(虽然还是有很多bug),实现了要求的功能,还增加了自己的创意。不过还是存在代码不够规范的问题,不同文件、不同类糅杂在一起,以至于我自己都不清楚我的代码文件是怎么组织的。
在完成这次实验的过程中,最大的困难是编写删除操作的代码。我会思考了很久才想出一种很复杂的方法,这也带来了大量的代码和bug,不过好在还是写出来了。但在跟其他同学交流之后,似乎他们的方法更为简单,而我的方法理论上在性能方面会更优秀(我也不太确定),为了偷个懒我也没有改。
还有一个遗憾是没有用到汇编语言。事实上大部分代码是用c++编写的,还用到了stl和linux的各种头文件里的很多内容,可能会导致代码的可移植性有点差。
这次实验的收获也是很明显的,我锻炼了编写较大规模程序的能力,对文件系统和操作系统有了更深入的了解,也激发了我进一步学习操作系统的兴趣。
总的来说,这次实验完成的十分艰难,但也是收获满满,有一些做的不错的地方,也有不少改进的空间。希望在接下来的课程中也能有这么有趣的实验。